LiDAR技术为无人驾驶保驾护航
自动驾驶汽车的工作原理基本上都是依靠一些使车辆能够“看到”周边环境的系统的存在。要替代人类驾驶员识别物体、读取交通信号以及判断速度和距离的能力,并非易事。您的汽车可能已经配备了倒车警报系统、停车摄像头或用于避免碰撞的自动制动系统,但这些都只是支持系统;您仍然需要负责控制车辆。完全自动驾驶(自主驾驶)汽车目前仍处于试验阶段。这种汽车需要两种类型的传感器系统:
- 本体感应传感器——负责监控车辆的内部状态,例如测量车轮速度和惯性以及感知驾驶员的注意力
- 外部感应传感器——负责适应车辆的外部环境,例如判断物体距离。
LiDAR(激光探测和测距)是外部感应系统的一种。《光学与光子学新闻》(Optics and Photonics News )最近刊登了一篇文章,介绍了新一代LiDAR将如何在未来自动驾驶车辆的视觉导航系统中发挥重要作用。LiDAR(也称为“激光雷达”)是一种工作原理跟雷达类似的技术,就是根据激光遇到障碍物后的折返时间,计算目标与自己的相对距离。这项技术与雷达(无线电探测和测距)相似。雷达以无线电波为基础,自20世纪40年代以来一直被普遍使用。
相比之下,LiDAR是NASA(美国宇航局)在20世纪60年代发明的,用于在太空中测量距离,其将激光脉冲作为信号。
自主驾驶车辆使用人工智能来处理和整合来自一系列传感器系统的数据,包括:
- 相机图像
- 微波雷达
- 超声波传感器
- LiDAR
这些类型的传感器各有其优点和缺点,因此通过将多种技术整合在一辆车上,可以提供最全面的功能。超声波传感器可以识别附近的物体,以帮助执行停车等驾驶任务以及协助倒车摄像头工作,但其在计算较远处的物体方面比较困难。摄像头可以捕捉周边环境中的细节,但无法测量距离。微波雷达的分辨率有限,但它确实可以测量距离和速度。
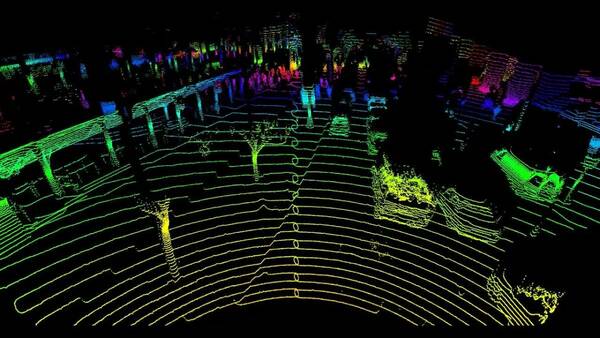
图片为采用LiDAR技术的自动驾驶汽车所看到的车辆周边环境。如需观看完整视频,请访问《纽约时报》网站。
LiDAR既可以测量距离,也可以创建局部环境的点云。到目前为止,LiDAR提供的产品范围有限,并且价格很高,但新的开发成果可能会使其具有市场可行性。要使自主驾驶成为日常现实,扩展LiDAR的产品范围并降低成本是一项关键挑战。如需了解更多有关LiDAR功能和优势的信息,请查看Jeff Hecht撰写的完整文章:“LiDAR在自动驾驶汽车中的应用”。
Radiant提供车载照明和显示器测量解决方案以及近红外(NIR) LED等传感技术,可帮助实现LiDAR技术的广泛应用。如需了解更多有关如何测量NIR发射器角度辐射强度和模式的信息,请联系我们与专家进行交流。
